
Apple picking robot Project
Project information
- Category: SLAM/Navigation/Robotics
- Affiliation: TU Delft MDP
- Project date: 2025
- Project URL: tudelft.nl
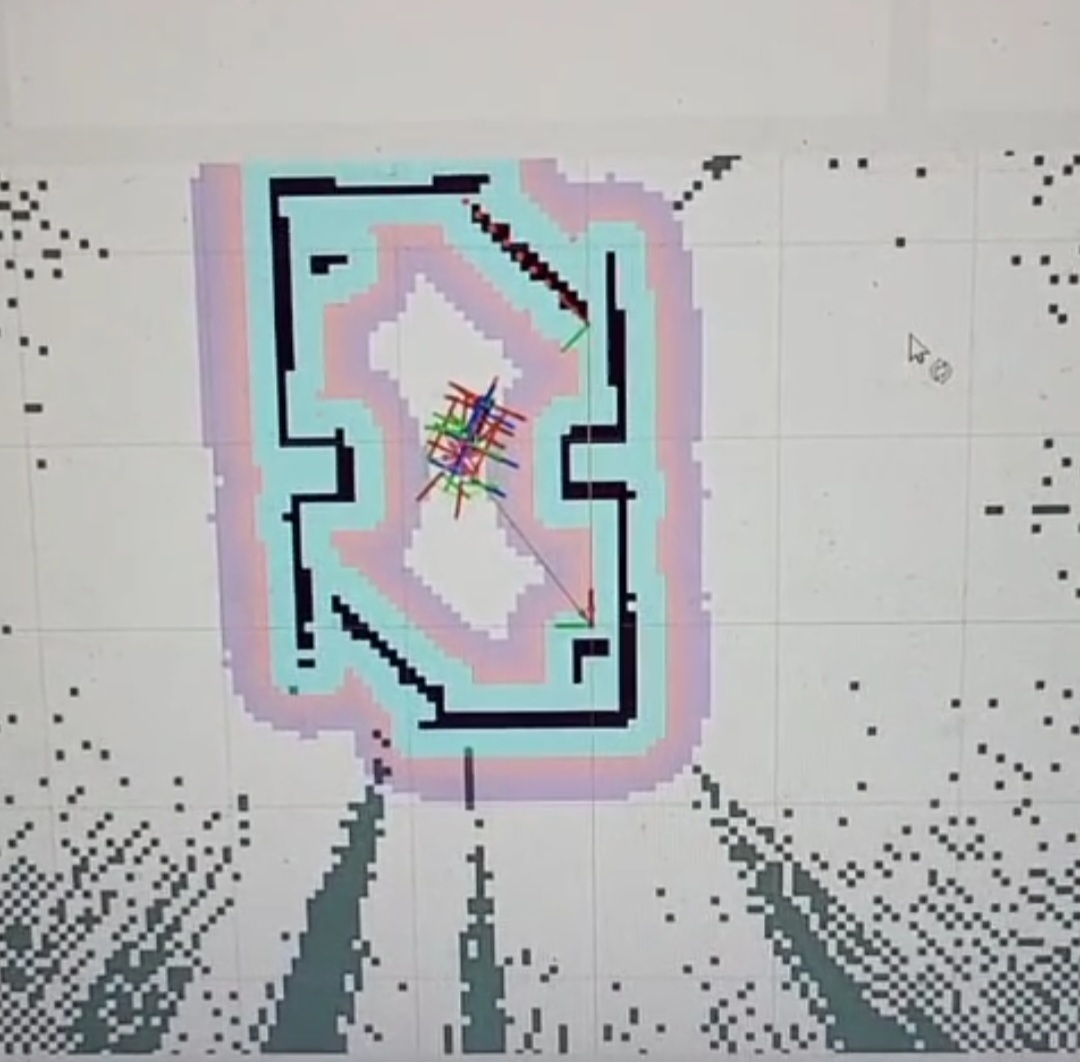
SLAM and NAV2 implementation for autonomous apple picking robot for TU Delft MDP
For MSc Robotics students at TU Delft, Multidisciplinary Project (MDP) is the culmination of the first teaching year. In this project, together with the team, we had to make an autonomous apple-picking robot using Mirte Master robot. The key difficulties are to self-arrange the team for a substantial project, to split tasks and keep up, as the robot had to be showcased just 8 weeks from kick-off. My main area was SLAM and Navigation stack which I implemented successfully to avoid static and dynamic obstacles.